Populaire zoekopdrachten
Snel naar
Trending now
Populaire zoekopdrachten
Snel naar
Trending now
Aanbevolen
Kentaro Miura
€ 44,10
Sarah J. Maas
€ 72,00
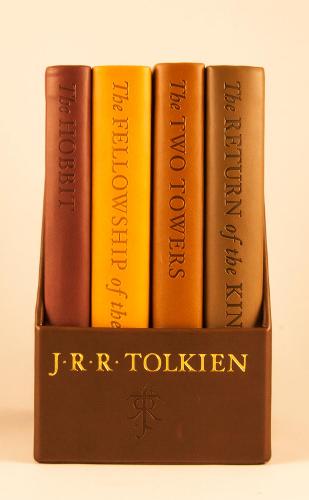
J. R. R. Tolkien
€ 52,20
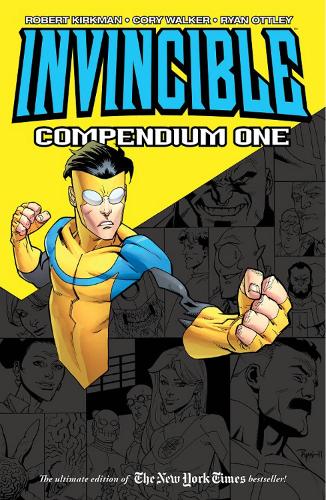
Robert Kirkman || Cory Walker || Ryan Ottley
€ 56,70
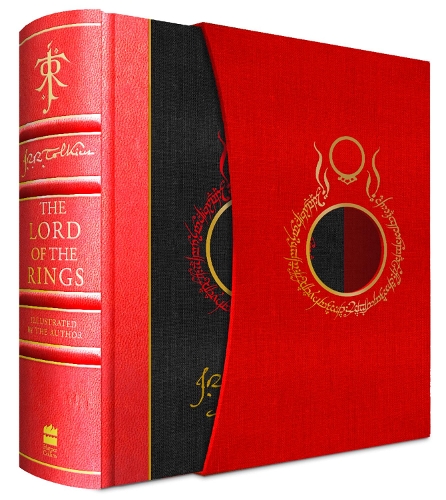
J R R Tolkien
€ 160,20
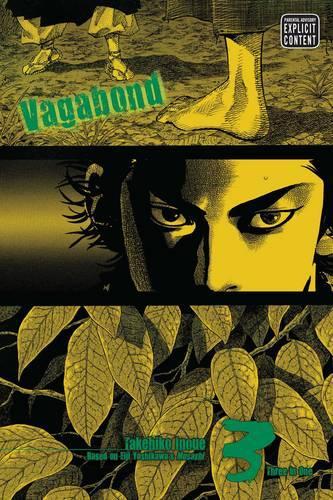
Takehiko Inoue
€ 23,40
Takehiko Inoue
€ 23,40
Leigh Bardugo
€ 36,00
Stephanie Garber
€ 18,00
Joe Abercrombie
€ 53,10
Serie & gerelateerd

J A Konrath || Blake Crouch
Serial Killers Uncut
€ 29,43
King
Green Mile
€ 36,47

Serial Publication
Symposia Mathematica: v.25
€ 0,00
Serial Kolor
Alphonse Mecha: A Biomechanical Art Nouveau Coloring Book for Adults
€ 20,30
Sarah Bacaller
She, Tenacity
€ 24,64

Harker McNair
Super Duper Serial
€ 28,55
Pour Serial Killers
Inspiratonal coloring book: Coloring & Activity Book (Design Originals)Beginner-Friendly Empowering Art Activities for Tweens
€ 18,00
The Serial Intellectual
Limitations and Losses: Two Inescapable Realities
€ 21,75
The Serial Intellectual
Emotional Triumvirate
€ 20,37
The Serial Intellectual
Tenses
€ 18,23