header.popularSearches
header.quickLinks
Trending now
Aanbevolen
Kentaro Miura
€ 44,10
Sarah J. Maas
€ 72,00
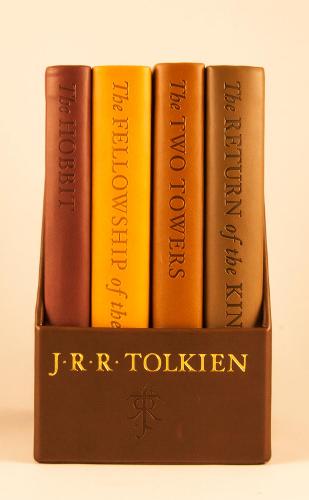
J. R. R. Tolkien
€ 49,50
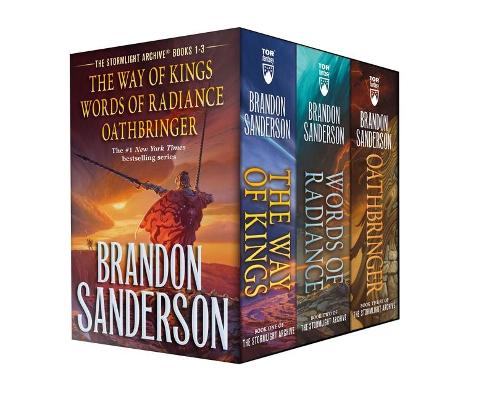
Brandon Sanderson
€ 29,70
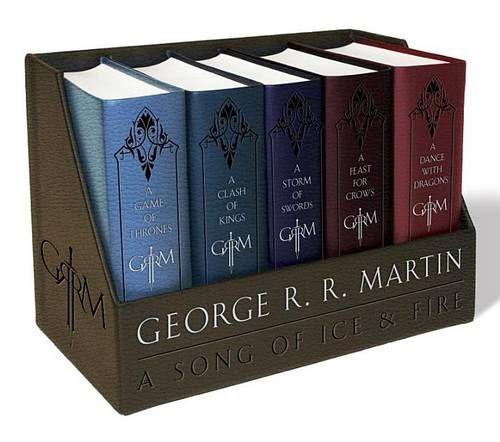
George R. R. Martin
€ 59,40
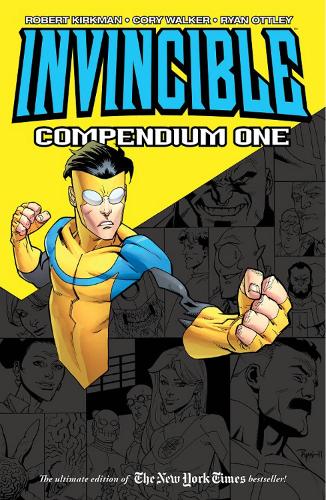
Robert Kirkman || Cory Walker || Ryan Ottley
€ 62,10
Mark Douglas
€ 46,80
Brandon Sanderson
€ 34,20
J R R Tolkien
€ 160,20
Takehiko Inoue
€ 21,60
Serie & gerelateerd
An An Chao
When Colleagues Offend You
€ 79,19
An
Eiropas Savien Bas NAS Politika: Politisko Dokumentu Anal Ze
€ 82,58
An
Evangelios AP
€ 29,43
An
Las Mil Y Una Noche: (spanish Edition) (Worldwide Classics)
€ 20,11

Jiang An || Jiang An
Chinese Word Book with Audio CD
€ 0,00
Helene An || Jacqueline An
An: To Eat: Recipes and Stories from a Vietnamese Family Kitchen
€ 48,30
An Leysen || An Leysen
Wizard Sofia
€ 26,56
An Leysen || An Leysen
Captain Sofia
€ 27,30
An Leysen || An Leysen
The Tin Soldier
€ 28,50
An Leysen || An Leysen
Snow White and the Seven Dwarfs
€ 22,33